The steps to create an autonomous aircraft, from design to product, are as follows:
- Concept of Operation
- Requirements
- Design
- Ground tests
- Test components
- Test system
- Flight tests
- Deployment
- Maintenance/Updates
As you progress through these steps, the cost of fixing problems increases exponentially.
Consider a typical closed-loop diagram:
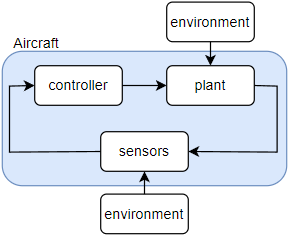
The "plant" consists of the airframe, actuators, and engine. The environment includes the atmosphere, aerodynamics, gravity, and electromagnetic interference.
During design phase, you start without any hardware and simulate everything with software-in-the-loop (SIL) simulations. The advantage of SIL is that it allows you to run millions of automated tests in a short time and with low cost to verify that you don't have any logic errors in your software.
As hardware becomes available, you proceed to ground tests, transitioning more and more of your software from standard PCs to custom hardware. This slower and more costly step is called hardware-in-the-loop (HIL/HWIL) tests. HIL tests are necessary because:
- Your system might work in SIL but since certain bugs only manifest themselves on a particular OS - compiler - hardware configuration, you cannot be sure with just SIL tests that your software is bug-free. Note: Instead of bug-free, the term 'tolerable' might be more appropriate because, for complex software, it is statistically improbable to achieve an entirely bug-free state.
- Resource constraints (memory, processing power, network speed, etc.) of real hardware might differ from those in SIL which might cause a working system in SIL to fail in HIL due to missed timings etc.
- Electromagnetic conditions (interference, noise, etc.) might differ from those in SIL. Components that work individually in isolation might cause problems when integrated together.
- Although you can't test as extensively as with SIL, you can still conduct far more tests than with flight tests.
Music: Daydream In Blue
No comments:
Post a Comment